Notice: Undefined variable: 5133.7113252074 in /var/www/www-root/data/www/374.ru/tpl_text/text_picture.php on line 81
 |
| –≠—В–Њ Halluc II вАФ —Б—А–∞–Ј—Г –Є –ґ–Є–≤–Њ—В–љ–Њ–µ, –Є –љ–∞—Б–µ–Ї–Њ–Љ–Њ–µ, –Є —В—А–∞–љ—Б–њ–Њ—А—В–љ–Њ–µ —Б—А–µ–і—Б—В–≤–Њ. –Ц–∞–ї—М, —З—В–Њ –љ–µ –њ—Л–ї–µ—Б–Њ—Б вАФ –≤ —Н—В–Њ–Љ –∞–Љ–њ–ї—Г–∞ –Њ–љ –Љ–Њ–≥ –±—Л –њ—А–Є–≥–Њ–і–Є—В—М—Б—П —Г–ґ–µ —Б–µ–є—З–∞—Б (—Д–Њ—В–Њ —Б —Б–∞–є—В–∞ itpro.nikkeibp.co.jp). |
 |
| –Т–Њ—В —В–∞–Ї –≤—Б—О –ґ–Є–Ј–љ—М: —Е–Њ—З–µ—И—М "—Й—С–ї–Ї–љ—Г—В—М" —З—В–Њ-–љ–Є–±—Г–і—М –≤ –љ–µ–Њ–±—Л—З–љ–Њ–Љ —А–∞–Ї—Г—А—Б–µ, –Ї–∞–Ї —Б–∞–Љ –ґ–µ –≤ —Н—В–Њ–Љ –љ–µ–Њ–±—Л—З–љ–Њ–Љ —А–∞–Ї—Г—А—Б–µ –Є –Њ–Ї–∞–Ј—Л–≤–∞–µ—И—М—Б—ПвА¶ (—Д–Њ—В–Њ AP/Itsuo Inouye). |
Notice: Undefined variable: 5129.760395069 in /var/www/www-root/data/www/374.ru/tpl_text/text_picture.php on line 81
 |
| "–Р–ї–ї–Њ! –°–ї—Г–ґ–±–∞ –њ–Њ–і–і–µ—А–ґ–Ї–Є? –Ь–Њ–є –љ–Њ–≤—Л–є iPhone –≤–µ–і—С—В —Б–µ–±—П –Ї–∞–Ї-—В–Њ —Б—В—А–∞–љ–љ–ЊвА¶" (–≤–Є–і–µ–Њ pinktentacle3/youtube.com). |
 |
| –Р –≤–Њ—В "–У–ї—О–Ї –і–≤–∞" –≤ –њ—А–Њ—Ж–µ—Б—Б–µ –±—Л—Б—В—А–Њ–≥–Њ –≤—А–∞—Й–µ–љ–Є—П –≤–Њ–Ї—А—Г–≥ —Б–≤–Њ–µ–є –Њ—Б–Є. –Э–Є—З–µ–≥–Њ –љ–µ –њ–Њ–љ—П—В–љ–Њ, –Ј–∞—В–Њ –љ–∞–Ј–≤–∞–љ–Є–µ —А–Њ–±–Њ—В–∞ –Њ–њ—А–∞–≤–і–∞–љ–Њ –љ–∞ –≤—Б–µ —Б—В–Њ (—Д–Њ—В–Њ AP/Itsuo Inouye). |
 |
| –У–ї–∞–≤–љ—Л–є —А–∞–Ј—А–∞–±–Њ—В—З–Є–Ї Halluc II вАФ –Ґ–∞–Ї–∞—О–Ї–Є –§—Г—А—Г—В–∞ (Takayuki Furuta) вАФ –і–µ–Љ–Њ–љ—Б—В—А–Є—А—Г–µ—В, —З—В–Њ —А–Њ–±–Њ—В–Њ—В–µ—Е–љ–Є–Ї–∞ вАФ –ї—С–≥–Ї–Њ–µ –і–µ–ї–Њ: –≤—Б–µ–≥–Њ –і–≤–∞–і—Ж–∞—В—М –Ї–Є–ї–Њ–≥—А–∞–Љ–Љ–Њ–≤ (—Д–Њ—В–Њ —Б —Б–∞–є—В–∞ robot.watch.impress.co.jp). |
 |
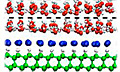
| –°–ї–µ–≤–∞ вАФ —А–µ–ґ–Є–Љ "–Ґ—А–∞–љ—Б–њ–Њ—А—В". –Т —Ж–µ–љ—В—А–µ вАФ "–Э–∞—Б–µ–Ї–Њ–Љ–Њ–µ". –°–њ—А–∞–≤–∞ вАФ "–Ц–Є–≤–Њ—В–љ–Њ–µ" (—Д–Њ—В–Њ —Б —Б–∞–є—В–∞ techon.nikkeibp.co.jp). |
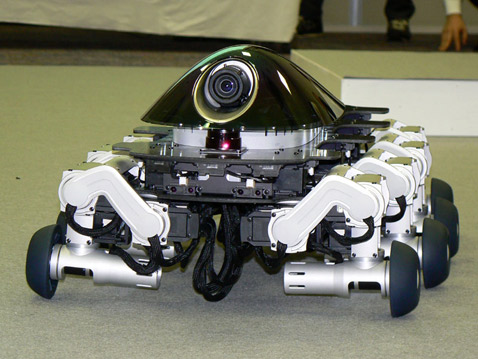 |
| –§–Њ—В–Њ–≥–µ–љ–Є—З–љ—Л–є "–У–ї—О–Ї –і–≤–∞" —Б–љ–∞–±–ґ—С–љ —Б–Є—Б—В–µ–Љ–Њ–є —Б–µ–љ—Б–Њ—А–Њ–≤, –Є –Є–Ј–Љ–µ—А–Є—В–µ–ї–µ–є —А–∞—Б—Б—В–Њ—П–љ–Є—П –і–Њ –Њ–±—К–µ–Ї—В–Њ–≤, –Ї–Њ—В–Њ—А—Л–µ –љ–µ –і–∞—О—В –µ–Љ—Г –љ–µ–Њ–ґ–Є–і–∞–љ–љ–Њ —Б–њ–Њ—В–Ї–љ—Г—В—М—Б—П –Њ–±–Њ —З—В–Њ-—В–Њ –Є–ї–Є –≤—А–µ–Ј–∞—В—М—Б—П –≤ –њ—А–µ–њ—П—В—Б—В–≤–Є–µ вАФ –і–∞–ґ–µ –µ—Б–ї–Є –Њ–њ–µ—А–∞—В–Њ—А—Г —Н—В–Њ–≥–Њ –Њ—З–µ–љ—М —Е–Њ—З–µ—В—Б—П (—Д–Њ—В–Њ —Б —Б–∞–є—В–∞ robot.watch.impress.co.jp). |
 |
| "–Я–Њ—И—С–ї –њ–Њ —Б–≤–Њ–Є–Љ –і–µ–ї–∞–Љ". –Я–ї–∞–≤–љ–Њ—Б—В—М –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є—П Halluc II –Њ–±–µ—Б–њ–µ—З–Є–≤–∞—О—В 56 –Љ–Њ—В–Њ—А–Њ–≤ вАФ –њ–Њ –і–≤–∞ –љ–∞ –Ї–∞–ґ–і—Л–µ —В—А–Є —Б—Г—Б—В–∞–≤–∞ –Ї–∞–ґ–і–Њ–є –љ–Њ–≥–Є –Є –њ–Њ –Њ–і–љ–Њ–Љ—Г –Љ–Њ—В–Њ—А—Г –љ–∞ –Ї–∞–ґ–і–Њ–µ –Ї–Њ–ї–µ—Б–Њ. –Т–Њ—В –µ—Й—С –љ–µ–Ї–Њ—В–Њ—А—Л–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є —А–Њ–±–Њ—В–∞: –і–ї–Є–љ–∞ вАФ 805 –Љ–Є–ї–ї–Є–Љ–µ—В—А–Њ–≤, –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ—Л–є —Г–≥–Њ–ї –љ–∞–Ї–ї–Њ–љ–∞ –њ–ї–Њ—Б–Ї–Њ—Б—В–Є вАФ 40¬∞, –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–∞—П –≤—Л—Б–Њ—В–∞ –њ—А–µ–Њ–і–Њ–ї–µ–≤–∞–µ–Љ–Њ–≥–Њ –њ—А–µ–њ—П—В—Б—В–≤–Є—П вАФ 125 –Љ–Є–ї–ї–Є–Љ–µ—В—А–Њ–≤ (—Д–Њ—В–Њ —Б —Б–∞–є—В–∞ robot.watch.impress.co.jp). |
–Т —Н—В–Њ–Љ —А–µ–ґ–Є–Љ–µ Halluc II —В–Њ–ґ–µ —Е–Њ–і–Є—В, —А–∞–Ј–љ–Є—Ж–∞ —В–Њ–ї—М–Ї–Њ –≤ —В–Њ–Љ, —З—В–Њ –Њ–љ –Њ–њ–Є—А–∞–µ—В—Б—П –љ–∞ —В–Њ—А—Ж–µ–≤—Л–µ —Б—В–Њ—А–Њ–љ—Л –Ї–Њ–ї—С—Б–Є–Ї–Њ–≤, –љ–µ –≤—А–∞—Й–∞—П –Є–Љ–Є, –∞ –ї–∞–њ—Л –њ—А–Є —Н—В–Њ–Љ –љ–µ —А–∞—Б—В–Њ–њ—Л—А–µ–љ—Л –≤ —А–∞–Ј–љ—Л–µ —Б—В–Њ—А–Њ–љ—Л. –Я–µ—А–µ–Љ–µ—Й–∞—В—М—Б—П –Ј–∞ —Б—З—С—В —Н—В–Њ–≥–Њ –Њ–љ –Љ–Њ–ґ–µ—В –Ї–∞–Ї —Г–≥–Њ–і–љ–Њ вАФ —Е–Њ—В—М –Ї—А–∞–і—Г—З–Є—Б—М.
–Ъ–Њ–љ–µ—З–љ–Њ, –≤ –љ–µ–Ї–Њ—В–Њ—А—Л—Е —Б–Є—В—Г–∞—Ж–Є—П—Е –љ–µ—В —Б–Љ—Л—Б–ї–∞ –њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П –Ї–∞–Ї–Є–Љ-—В–Њ —Б—В—А–Њ–≥–Њ –Њ–њ—А–µ–і–µ–ї—С–љ–љ—Л–Љ —Б—В–Є–ї—П–Љ–Є –і–≤–Є–ґ–µ–љ–Є—П вАФ –њ–Њ—А–Њ–є –Є—Е –њ—А–Є—Е–Њ–і–Є—В—Б—П –Ї–Њ–Љ–±–Є–љ–Є—А–Њ–≤–∞—В—М. –Р –Є–љ–Њ–≥–і–∞, –љ–∞–Њ–±–Њ—А–Њ—В, –і–≤–Є–ґ–µ–љ–Є—П –і–Њ–ї–ґ–љ—Л –±—Л—В—М –љ–∞—Б—В–Њ–ї—М–Ї–Њ –њ—А–Є–Љ–Є—В–Є–≤–љ—Л–Љ–Є, —З—В–Њ –Њ–љ–Є –љ–µ –і–Њ—В—П–≥–Є–≤–∞—О—В –љ–Є –і–Њ –Ї–∞–Ї–Њ–≥–Њ —Б—В–Є–ї—П.
–Э–∞–њ—А–Є–Љ–µ—А, –µ—Б–ї–Є —А–Њ–±–Њ—В—Г –љ—Г–ґ–љ–Њ –≤–Ј–Њ–±—А–∞—В—М—Б—П –љ–∞ —Б—В—Г–њ–µ–љ—М–Ї—Г, –Њ–љ –і–Њ–ї–ґ–µ–љ –њ–Њ–њ–∞—А–љ–Њ —Б—В–∞–≤–Є—В—М –і—А—Г–≥ –Ј–∞ –і—А—Г–≥–Њ–Љ –Ї–Њ–ї—С—Б–∞ –љ–∞ –љ–µ—С. –Ь—Г–і—А–Є—В—М –Ј–і–µ—Б—М –Њ—Б–Њ–±–µ–љ–љ–Њ –љ–µ –љ—Г–ґ–љ–Њ: –ї—О–±–Њ–є –і—А—Г–≥–Њ–є —Б–њ–Њ—Б–Њ–± –і–≤–Є–ґ–µ–љ–Є—П –≤ —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –Њ–Ї–∞–ґ–µ—В—Б—П —Б–ї–Є—И–Ї–Њ–Љ —Н–љ–µ—А–≥–Њ–Ј–∞—В—А–∞—В–љ—Л–Љ –Є –Љ–∞–ї–Њ—Г–і–Њ–±–љ—Л–Љ.
–Т–њ—А–Њ—З–µ–Љ, –≤—Б—С —Н—В–Њ –≤—Л –≤–њ–Њ–ї–љ–µ –Љ–Њ–ґ–µ—В–µ —Г–≤–Є–і–µ—В—М —Б–∞–Љ–Є, –њ–Њ—Б–Љ–Њ—В—А–µ–≤ –њ–∞—А—Г —А–Њ–ї–Є–Ї–Њ–≤ –љ–∞ YouTube вАФ 1 & 2.
–†–∞–Ј—А–∞–±–Њ—В—З–Є–Ї–Є Halluc II –Њ—З–µ–љ—М –љ–∞–і–µ—О—В—Б—П, —З—В–Њ –Є—Е –і–µ—В–Є—Й–µ —Г–ґ–µ –Њ—З–µ–љ—М —Б–Ї–Њ—А–Њ –±—Г–і–µ—В –њ—А–Є–Љ–µ–љ—П—В—М—Б—П –љ–∞ –њ—А–∞–Ї—В–Є–Ї–µ. –†–µ–Ј–Њ–љ–љ—Л–є –≤–Њ–њ—А–Њ—Б: –љ–∞ –Ї–∞–Ї–Њ–є —В–∞–Ї–Њ–є –њ—А–∞–Ї—В–Є–Ї–µ? –†–∞–Ј—Г–Љ–љ—Л–є –Њ—В–≤–µ—В: –≤ –Њ—Б–љ–Њ–≤–љ–Њ–Љ –љ–∞ —Б–њ–∞—Б–∞—В–µ–ї—М–љ—Л—Е –Њ–њ–µ—А–∞—Ж–Є—П—Е –≤ —Б–ї–Њ–ґ–љ—Л—Е —Г—Б–ї–Њ–≤–Є—П—Е вАФ –і–ї—П –і–Њ—Б—В–∞–≤–Ї–Є –≥—А—Г–Ј–Њ–≤ –Є —В—А–∞–љ—Б–њ–Њ—А—В–Є—А–Њ–≤–Ї–Є –њ–Њ—Б—В—А–∞–і–∞–≤—И–Є—Е –ї—О–і–µ–є. –Э–Њ –і–ї—П —Н—В–Њ–≥–Њ —А–Њ–±–Њ—В, –Ї–∞–Ї –Љ–Є–љ–Є–Љ—Г–Љ, –і–Њ–ї–ґ–µ–љ –±—Г–і–µ—В –љ–µ–Љ–љ–Њ–≥–Њ "–њ–Њ–і—А–∞—Б—В–Є".
–Я–Њ –Њ—Ж–µ–љ–Ї–∞–Љ –Є–Ј–Њ–±—А–µ—В–∞—В–µ–ї–µ–є, —Н—В–Њ–≥–Њ —Б—З–∞—Б—В–ї–Є–≤–Њ–≥–Њ –і–љ—П –љ–∞–Љ –ґ–і–∞—В—М –љ–µ–і–Њ–ї–≥–Њ вАФ –≤—Б–µ–≥–Њ –ї–µ—В –њ—П—В—М.
–•–Њ—В–Є—В–µ –њ—А–Њ–Ї–Њ–Љ–Љ–µ–љ—В–Є—А–Њ–≤–∞—В—М?
–Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ...
–°–Њ–Ј–і–∞–љ—Л –њ—А–Њ—В–Њ—В–Є–њ—Л –Ї–≤–∞–љ—В–Њ–≤—Л—Е –Ї–Њ–Љ–њ—М—О—В–µ—А–Њ–≤
–°—А–∞–Ј—Г –і–≤–µ –≥—А—Г–њ–њ—Л...
–Р–≤—Б—В—А–Є–є—Ж—Л —Б–Њ–µ–і–Є–љ–Є–ї–Є –і–≤–∞ —Б—В–∞–Ї–∞–љ–∞ –≤–Њ–і—П–љ—Л–Љ –Љ–Њ—Б—В–Є–Ї–Њ–Љ
–Я–Њ–і –≤–Њ–Ј–і–µ–є—Б—В–≤–Є–µ–Љ...
V
...